Dafür wird ein Gravimeter in einem Fahrzeug, Schiff oder Flugzeug montiert. Dies kann in der Praxis sehr viel effizienter sein als die Aufstellung eines terrestrischen Gravimeters auf vielen Punkten entlang des Weges, besonders, wenn man eine ganze Region oder sogar ein ganzes Land gravimetrisch vermessen möchte. Hinzu kommt, dass auf Wasser oder in unwegsamem Gelände keine terrestrischen Messungen möglich sind.
In einer solchen dynamischen Messumgebung entsteht eine besondere Schwierigkeit: Unvermeidbare Auf- und Abbewegungen des Fahrzeugs oder Flugzeugs entstehen durch Vertikalbeschleunigungen, welche sich mit der zu messenden Erdschwere vermischen. Diese Fahrzeugbeschleunigungen können bis zu einige m/s² ausmachen (Turbulenzen, schlechter Fahrbahnbelag, Fahr- oder Flugmanöver), während die angestrebte Genauigkeit der eigentlichen Schweremessungen bei etwa 0,000 01 m/s² liegt! Mit einem Gravimeter allein ist hier also eine Schweremessung nicht möglich – es wird ein zweiter, unabhängiger Sensor benötigt, der die vertikalen Beschleunigungen des Fahrzeugs oder Flugzeugs geometrisch misst, so dass diese dann aus dem vom Gravimeter gemessenen Mischsignal herausgerechnet werden können. In den 1980er Jahren wurden hierfür beispielsweise Radar-Echolote von Flugzeugen verwendet. Heute kommt stattdessen GPS/GNSS unter Verwendung hochgenauer geodätischer Empfänger und Auswertemethoden zum Einsatz, da es in der Praxis sehr viel einfacher und kostengünstiger betrieben werden kann.
Eine weitere Schwierigkeit bei kinematischen Messungen entsteht dadurch, dass ein Gravimeter immer in der lokalen Lotrichtung (nach „unten“) ausgerichtet sein muss, um die Schwere messen zu können. Ein Fahrzeug oder Flugzeug neigt sich jedoch ständig, beispielsweise an Anstiegen oder während Manövern. Die gängige technische Lösung besteht darin, das Gravimeter auf einer so genannten stabilisierten kardanischen Plattform zu befestigen, die diese Schwankungen gerade aktiv mit Motoren ausgleicht. (Die enorme technische Anforderung erkennt man, wenn man einmal versucht während einer Autofahrt eine Wasserwaage genau horizontal zu halten!)

Am Fachgebiet Physikalische Geodäsie und Satellitengeodäsie erforschen wir seit 2011 die Verwendung von körperfesten inertialen Messsystemen (engl.: strapdown inertial measurement unit, IMU) anstatt von klassischen Gravimetern. Dabei bedeutet körperfest gerade, dass der Sensor direkt mit dem Rumpf des Fahrzeugs oder Flugzeugs verbunden ist, so dass hier keine aufwendige, stabilisierte Plattform erforderlich ist. Eine IMU beinhaltet je drei orthogonal angebrachte Drehratensensoren zur Lagebestimmung sowie drei Beschleunigungsmesser (vergleichbar mit der mechanischen Feder im Gravimeter). Obwohl IMUs typischerweise für Navigationsanwendungen oder die reine Lagebestimmung hergestellt werden, konnte am Fachgebiet der enorme Nutzen für die kinematische Gravimetrie gezeigt werden. Denn verglichen mit einem klassischen Gravimeter auf einer stabilisierten Plattform ist eine hochgenaue IMU nicht nur um ein deutlich günstiger, sondern zugleich auch um ein Vielfaches kleiner, leichter und sparsamer im Energieverbrauch, was in der Praxis Batteriebetrieb ermöglicht (Abbildung 1). Darüber hinaus kann eine IMU autonom Daten aufzeichnen, d.h. an Bord eines Schiffes oder Flugzeuges wird für die Schweremessungen kein Operateur benötigt, was insbesondere die Verwendung deutlich kleinerer und kostengünstigerer Flugzeuge ermöglicht.

Seit 2011 war das Fachgebiet an Fluggravimetrie-Messungen in Portugal, Chile, Malaysia, Mosambik, Malawi, den USA, Dänemark und zwei Messkampagnen in der Antarktis beteiligt. Im Frühjahr 2017 konnten die praktischen Vorteile dieser Sensoren besonders eindrucksvoll demonstriert werden: Eine dichte, gravimetrische Befliegung eines Gebietes im Odenwald erfolgte mit einem sparsamen Motorsegelflugzeug vom Typ Grob G-109b (Abbildung 2) – nach Kenntnisstand des Autors war dies die bis dato kleinste Plattform, die jemals erfolgreich für Fluggravimetrie eingesetzt wurde. An Bord befand sich während der Messflüge nur ein Pilot.
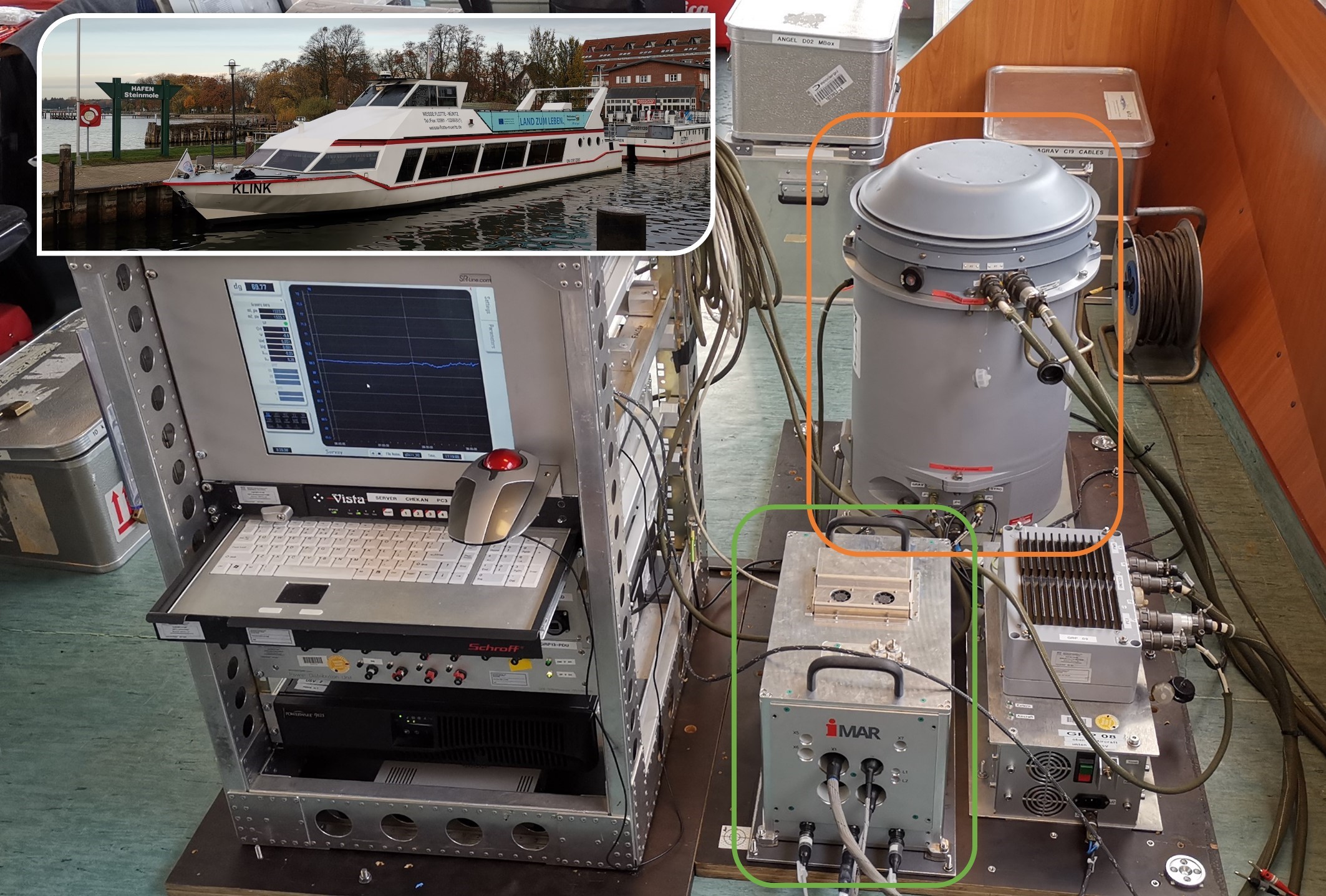
Seit 2018 ist die Strapdown-IMU des Fachgebiets mit einer temperaturstabilisierten Einhausung ausgestattet, wodurch Sensordriften reduziert werden und die Genauigkeit weiter verbessert wird. Aufgrund der langsameren Fahrtgeschwindigkeit und der meist geringeren Turbulenzen werden die höchsten Genauigkeiten der dynamischen Gravimetrie in der Schiffsgravimetrie erreicht. Hier war und ist das Fachgebiet an zahlreichen Projekten beteiligt, mehrfach auf Nord- und Ostsee sowie auf der Müritz, dem größten Binnensee Deutschlands (Abbildung 3).